
Hardware und Software
SPI-Simulyzer
Der SPI-Simulyzer ist eine Interface-Box, mit der zum einen Daten schnell und unkompliziert ausgelesen werden können, zum anderen mittels Simulationsdaten aktiv in das Geschehen eingegriffen werden kann.
Professionelle Datensimulation
Fakten zum SPI-Simulyzer
Neben der Standardausführung bietet Seskion auch modifizierte Ausführungen sowie weiterführende Hard- und Softwarelösungen für spezielle Mess-Anforderungen an.
- Standard Windows Gui Anwendung (optional): Die protokollspezifische Gui-Applikation bietet vielfältige Einstellungsmöglichkeiten von der Definition von Signalen, Baudraten und Fehlererkennung sowie Triggerevents. Die Visualisierung der SPI Bus Kommunikation erleichtert die Fehlersuche und lässt sich außerdem leicht sichern. Die SPI Daten werden mit Zeitstempeln aufgezeichnet, wobei sowohl der Import wie Export von Daten möglich ist.
- API-ANSI-C (in Box enthalten)
- LabVIEW Lib (optional)
Letzte Versionen:
| Version | Datum | Download |
| V1.21.4 | 16.07.2024 | SPI-SimulyzerSetup_V1_21_4.msi |
| V1.19.11 | 20.06.2021 | SPI-SimulyzerSetup_V1_19_11.msi |
| V1.19.8 | 01.12.2020 | SPI-SimulyzerSetup_V1_19_8.msi |
| V1.17.8 | 27.08.2018 | SPI-SimulyzerSetup_V1_17_8.msi |
| V1.17 | 10.11.2016 | SPI-SimulyzerSetup_V1_17.msi |
| Schnittstellen | USB 2.0 sowie Anschlüsse für Steuergerät und Sensor |
| Stromversorgung | über USB oder externes Stecker Netzteil |
| Kompatibel | Windows-7 +10, Microsoft .NET Framework 2.0, Linux (nur API, ohne GUI) |
| Aufzeichnung | Digital Aufzeichnung der SPI, Interfaces mit 48 Mega-Samples pro Sekunde |
| Datenexport | .csv-Datei (Excel) und .tdms-Datei (NI) |
| SPI Baudraten | als Steuergerät bis 16 MBit/s, als Sensor bis 8 MBit/s |
| Modi | Out-Frame oder In-Frame SPI |
Application Notes:
HiL-Setup with PSI5, SPI and SQUIB
Simulyzer-Software Operating Help
Optional 2nd-Channel or CAN-Interface
How to install Seskion License
Instructions Simulyzer LabView Library
Nützliche Links:
Simulyzer-Box
2.1001 SPI-Simulyzer USB-Box V2.1, 1-kanalig, Single-ended-Interfaces, 1.2V..5.5V, für Analyse + Simulation mit DLL
2.1101 SPI-Simulyzer USB-Box V2.0, 1-kanalig, LVDS-Interfaces für Analyse + Simulation mit DLL
Optionale Hardware-Zusätze
2.2001 Optionales CAN Interface – SPI Simulyzer
2.2002 Optional 2-ter SPI Kanal Analyse + Sensor Simulation
Software-Lizenzen
2.3001 Windows Softwarepaket SPI-Simulyzer Analyse + Sensor Simulation (Simulyzer-Box oder PC-ID gebundene Lizenz)
2.3002 Software-Lizenz für SPI Sensor Modell; pro PC-Arbeitsplatz und pro Sensor Modell. (Simulyzer-Box oder PC-ID gebundene Lizenz)
Sonstiges
2.4001 SPI-Simulyzer Verteilerplatine für Steuergerät und 3 Interfaces mit 3x Flachbandkabel
2.4002 SPI-Simulyzer Verteilerplatine -universal- für Steuergerät und 1 Interface
2.4003 SPI-Simulyzer Verteilerplatine für Steuergerät und 1 Interface mit Flachbandkabel
2.4101 SPI-Simulyzer LVDS-single ended Pod mit 2m Kabel
9.0001 Optional Garantieerweiterung der Simulyzer Box auf 3 Jahre
9.0011 LabView-2016 Library, 32- oder 64-Bit. PC-ID oder Box-SN-gebundene Lizenz
9.0012 LabView-2016 Library, 32- oder 64-Bit. Firmen-Lizenz
Serial Peripheral Interface
Das Serial Peripheral Interface (SPI) ist ein gängiges Bussystem in der Automotive-Sensorik. Steuergerät und periphäre Sensoren werden nach dem Master-Slave Prinzip miteinander verbunden. Jeder Teilnehmer ist an die Serial Clock (SCLK)-, MISO- und MOSI-Leitung angeschlossen. Über die Serial Clock synchronisiert der Master die Kommunikation.
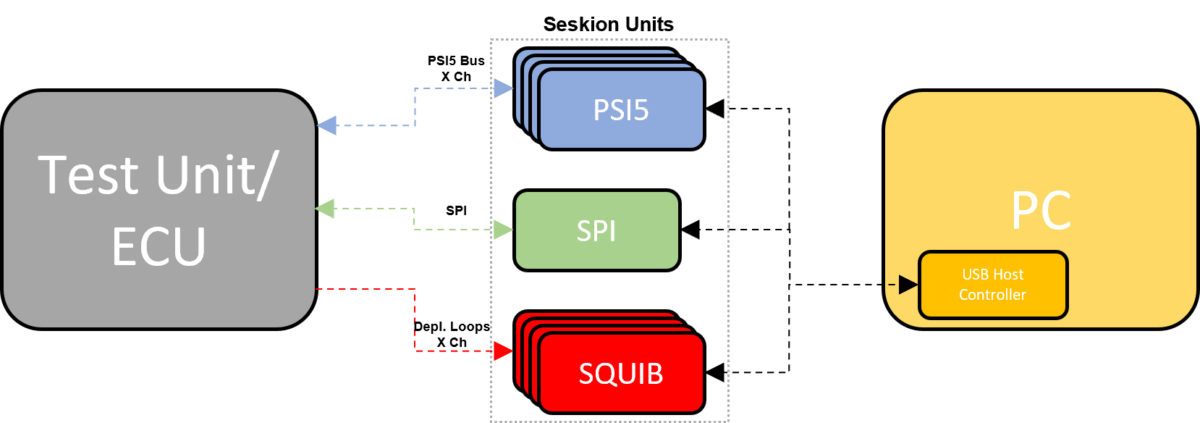
HiL-Simulation für Airbag-Steuergeräte
Um eine vollständige HIL-Simulation für ein Airbag-Steuergerät zu erstellen, müssen die internen Beschleunigungssensorsignale des Steuergeräts (SPI) und die peripheren Beschleunigungs- und Drucksensorsignale (PSI5) angeschlossen werden. Ebenfalls können die Zündzeitpunkte mittels der SQUIB-Box gemessen und analysiert werden. Weiterhin wird ein PC-System, das über einen USB-Port/Netzwerk mit den Simulatoren verbunden ist, zur Datenverarbeitung eingesetzt.
Häufig werden bis zu 6 oder mehr PSI5-Simulyzer zusammen mit mehreren SPI-Simulyzer betrieben. Zur Koordination gibt es eine übergeordnete Konfiguration, die festlegt, welcher Simulyzer verwendet wird, welche Signalwege von welchem Simulyzer genutzt werden und welche Detailkonfigurationen bei den Busparametern zu verwenden sind. Durch die Verwendung der übergeordneten Konfiguration ist die Bedienung der API sehr einfach.
Auch eine kontinuierliche Kontrolle der Sensorsignale kann vorgenommen werden.
Unsere Kunden