Backward communication (Sensor-ECU):
Periodically after every broadcast command each sensors send their measurement data in its defined timeslot.
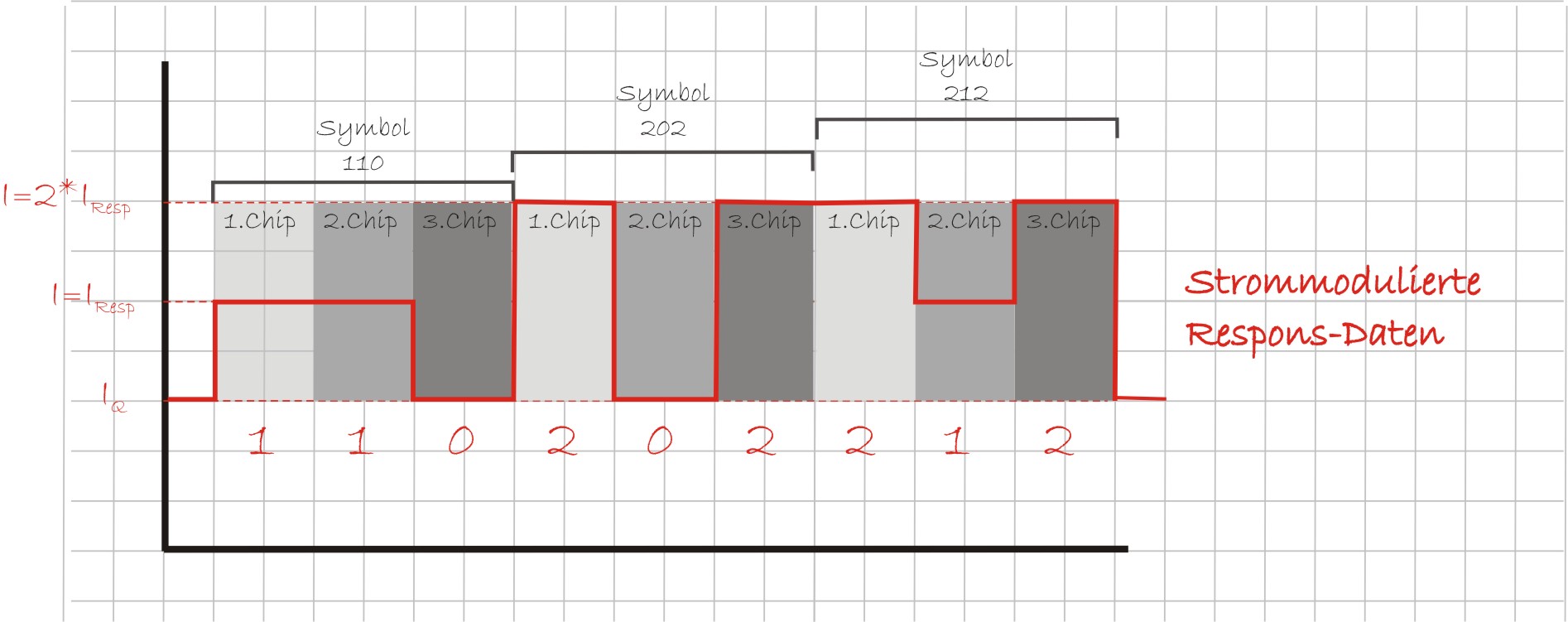
The data values are sent as current modulated symbol data packages.
3 chip packages results in a symbol. Each symbol contains a 4 bit information decoded as follows:
|
Transmitted symbol |
Information |
|||
|
Code table |
Binary code | Hexa decimal | ||
|
1 |
1 |
0 |
0000 |
0 |
|
2 |
1 |
1 |
0001 |
1 |
|
1 |
0 |
2 |
0010 |
2 |
|
2 |
0 |
2 |
0011 |
3 |
|
1 |
0 |
0 |
0100 |
4 |
|
2 |
1 |
2 |
0101 |
5 |
|
1 |
1 |
2 |
0110 |
6 |
|
2 |
0 |
1 |
0111 |
7 |
|
2 |
2 |
0 |
1000 |
8 |
|
2 |
1 |
0 |
1001 |
9 |
|
1 |
2 |
2 |
1010 |
A |
|
2 |
2 |
1 |
1011 |
B |
|
1 |
2 |
0 |
1100 |
C |
|
2 |
0 |
0 |
1101 |
D |
|
1 |
0 |
1 |
1110 |
E |
|
1 |
2 |
1 |
1111 |
F |
Because of the symbol code it is guaranteed that each data value starts with a current value (0 never exists in a chip).
Each data package is 32 bit long and is defined as follows:
