Parameter
CS_Decoder_Mask:
Presents the mask of the data frame of the MOSI line in which the significant
commands data will be sent.
This value is sensor specified and have no standard, so it have to
get from the sensor data sheet of the manufacturer.
Example:
2 connected sensors.
Sensor 1 supports a x- and a y-signal and is connected to CS line 0.
Sensor 2 supports a z-signal and a temperature signal and is connected
to the CS line 1.
The data frame of the both sensors
has 16 bit (sensor data sheet of the manufacturer)
(Picture: data sheet section of the
manufacturer)

From the data sheet we get that the read command of the master has
a length of 8 bit.
The first 6 bit (A5:A0) contain the read command, the 2 further bits
(RB/W and (aPAR) contain the status and the error detection bit.
Further more the data sheet of the sensor delivers the detailed read
command of the x-signal.
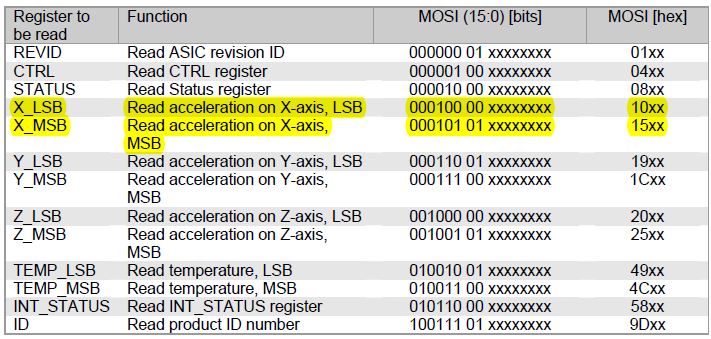
Getting the MSB value of x-signal is carried out by the read
command 15xx (0001 0101 xxxx xxxx), and the LSB value by 10xx (0001
0000 xxxx xxxx).
With the parameter DecoderMask
= ff00
according to 1111 1111 xxxx
xxxx defines, that the first 8 bit of the read command are masked,
that means are relevant. The
1 means, that the bit is used for the
command, but not present the value of the command. The value is defined
with the parameter DecoderValue.
Y-signal of the sensor 1 and z-signal and temperature signal of the
sensor 2 accords to the same systematic.
Read the y-signal by the command 19xx
and 1Cxx.
Read the z-signal by the command 20xx
and 25xx,
read the temperature signal by the
command 49xx.
Decoder_Mask for y-signal = ff00
Decoder_Mask for z-signal = ff00
Decoder Mask for temperature sgnal ff00