The SPI-Bus has 4 lines at minimum (max. 7 lines):
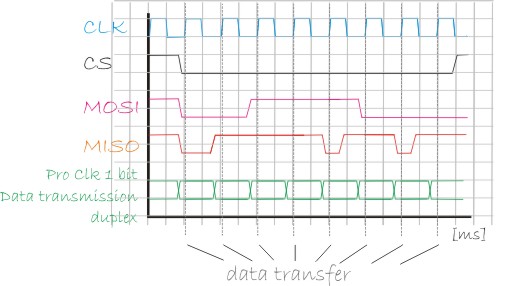
After the CS line has selected the desired sensor, the master data and the sensor data will be transmitted bit for bit and clock by clock to the bus.
Example of a SPI-Bus communication with one CS:
The following variations of the settings of the Clk-Signal results in 4 BUS operating systems:
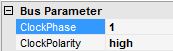
| CLK-Phase | CLK-Polarity | Settings Simulyzer | ||
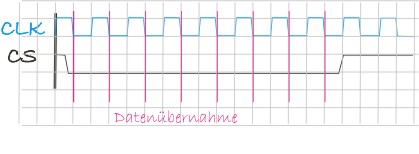
| Data transmission by rising edge. | Idle = 0 | 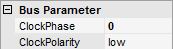 |
||
 |
||||
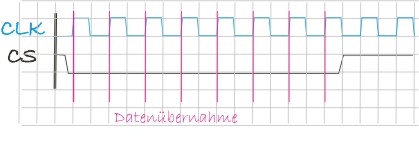
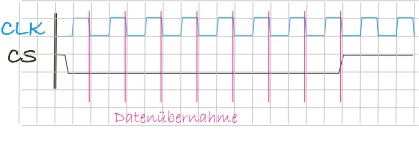
| Data transmission by rising edge. | Idle=1 | 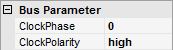 |
||
 |
||||
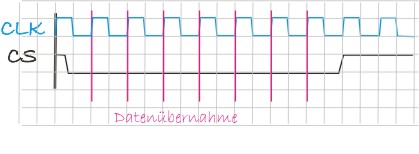
| Data
transmission by falling edge.
|
Idle=0
|
 |
||
 |
||||
| Data transmission by falling edge. | Idle=1
|
 |
||
 |
||||
The following parameters are necessary for further characteristics of the SPI-Bus:

The parameters are filled with predefined values, that means settings are only available if the desired values different from the predefined values.